Leading the development of Python software to automate and streamline tasks
within the Support Department at Wolt to increase me and my colleagues key performance indicators (KPI's) by over 100%.
What:
Wolt supports many thousands independent couriers each day. We have over 200 support employees in Denmark. A courier makes money by delivering as many orders as possible per hour.
Sometimes they don't want to deliver an order, because it it too far, or too close, and therefore not time efficient for the courier.
Therefore, support personnel have to "Unassign" couriers their tasks, when the courier asks for it, in the support chat.
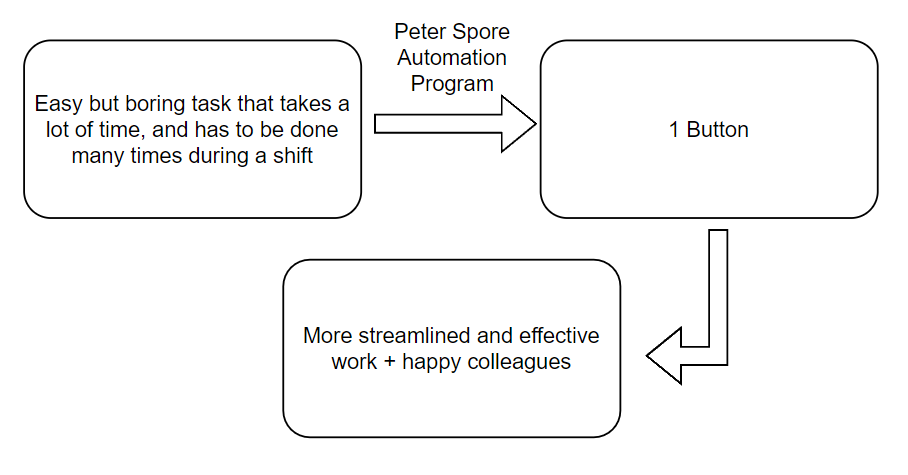
This task is tedious, and takes around 1 minute, each time, to unassign a courier.
After suggesting to Wolt to make this task easier for the Support Team, I decided to make my own bot, to automate and streamline this boring task. How:
As I cannot share in detail how Wolt's internal systems specifically works, I can only explain it in loose terms. There are around 10 steps to "Unassign" a couriers task.
For example: What is the couriers name, which order does he want removed etc. I simply used Python, the Selenium package to interact with the HTML elements, and Tkinter to create a graphical user interface.
I created a button via Tkinter that does all the actions it normally takes to unassign a courier, and combined it into 1 single button. Results:
As it took a normal support agent in Wolt approximately 60 seconds to unassign a courier, and my bot could do it in 5 seconds, the efficiency increase is 12 fold.
What:
Design and idea development of PLC programming to simulate a production line of a beverage. Performed a SCOPE analysis to initiate the programming process. How:
PLC: SIMATIC s7-1512C-1 PN. Used 8 motors, many sensors, pressured air and a belt. LADDER programming with self-hold functions. Results:
The design fulfilled its purpose, simulating a beverage production line: Filling, stirring, and bottle cap attachment. Faster and more reliable production than 95% of the class.
What:
Goal is to reach the black square in a random maze within the shortest amount of time. As you can see in the video, we placed it in the spot to take the longest time, for this specific maze. Raspberry Pi 3 Model B. 2x DC micro gear motor, reduction rate 1:30, 6V/600RPM. 5x Infrared sensors on the bottom. How:
The Infrared sensors calibrates, so it knows the difference between black lines and the background. For this project, we decided to have the bot always go left if it could, since you always can find your way out in a maze, if you just follow one side. Results:
Bot could always find the goal square in any maze, no matter the complexity or length. Bot was faster than any other bot in the class.
What:
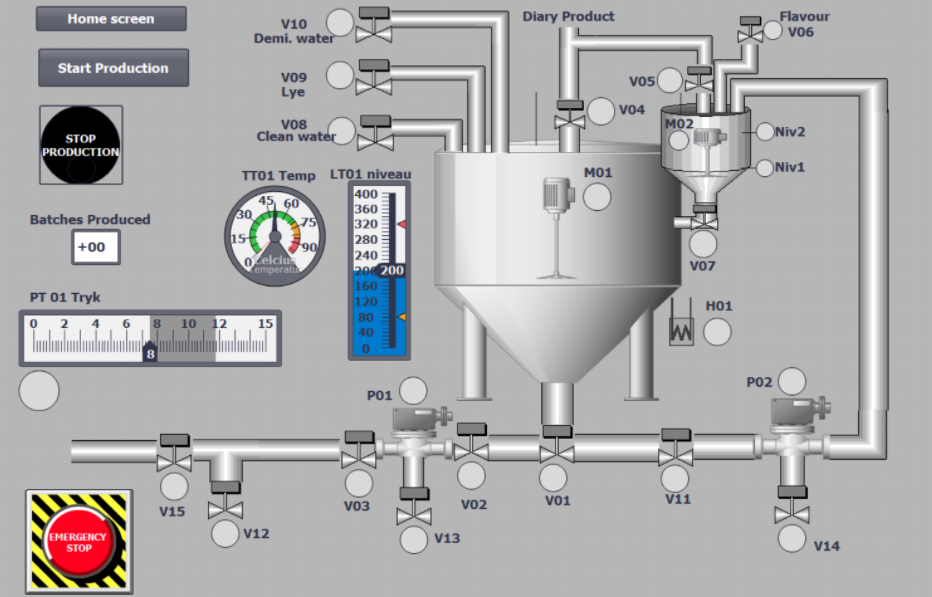
When you choose one of the 3 flavors, the production will run 24/7, regulating analog inputs and outputs, opening and closing a lot of valves in the right order, producing dairy products such as yoghurt, milk, etc.
Cleaning in Place (CIP) systems, living up to the high standards of food production. How:
Created a user manual for safe use.
Created function descriptions and sequence diagrams to ease the presentation of complex PLC programming.
Project management tools to steer the project.
Living up to machine safety directives and standards, such as PED Directive, EMC Directive, The Low Voltage Directive etc.
Results:
Simulated the production in Siemens TIA Simulation Portal, to run efficiently 24/7, with 3 different flavors and CIP systems.
Being able to connect it to a real production, and run with minimal change of code.
What:
Class competition. Goal was to get as far as possible in an "obstacle" course.
Arduino car with 2x small low voltage step motors, and 2x Infrared sensors.
How:
Simple Arduino programming.
As the competition was held in a tree workshop, there was a lot of sawdust on the ground. My solution was glue dots on the wheels for more traction.
Results:
Won the class competition as my car reached the furthest in the obstacle course.